Autonomous Navigation
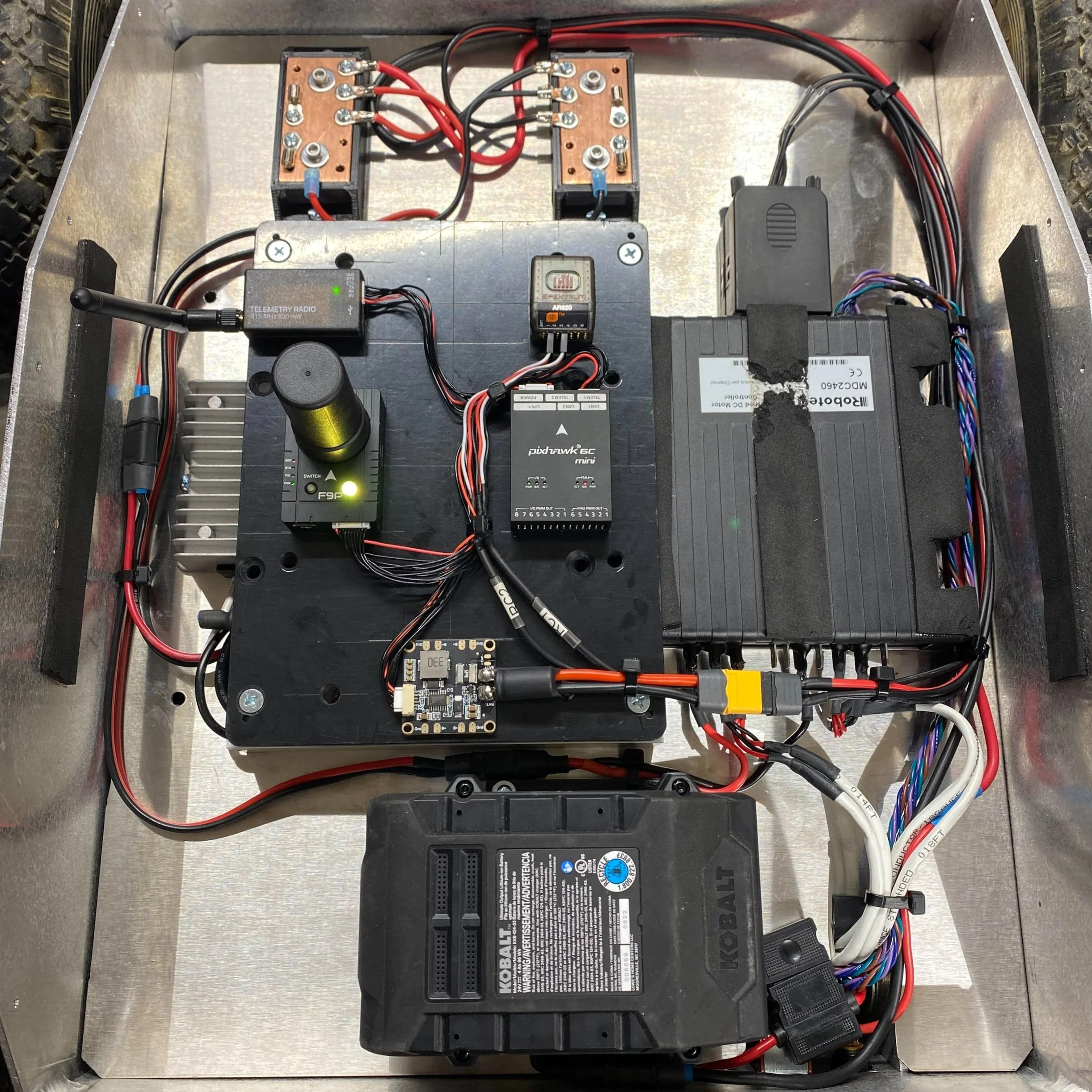
The focus of this project was to implement an RTK-GNSS system to provide centimeter level navigation in outdoor environments. The mobile platform used is 4WD with differential steering, utilizes run flat tires and features redundant drive motors.