TaRRo2
Robotics Activities Group
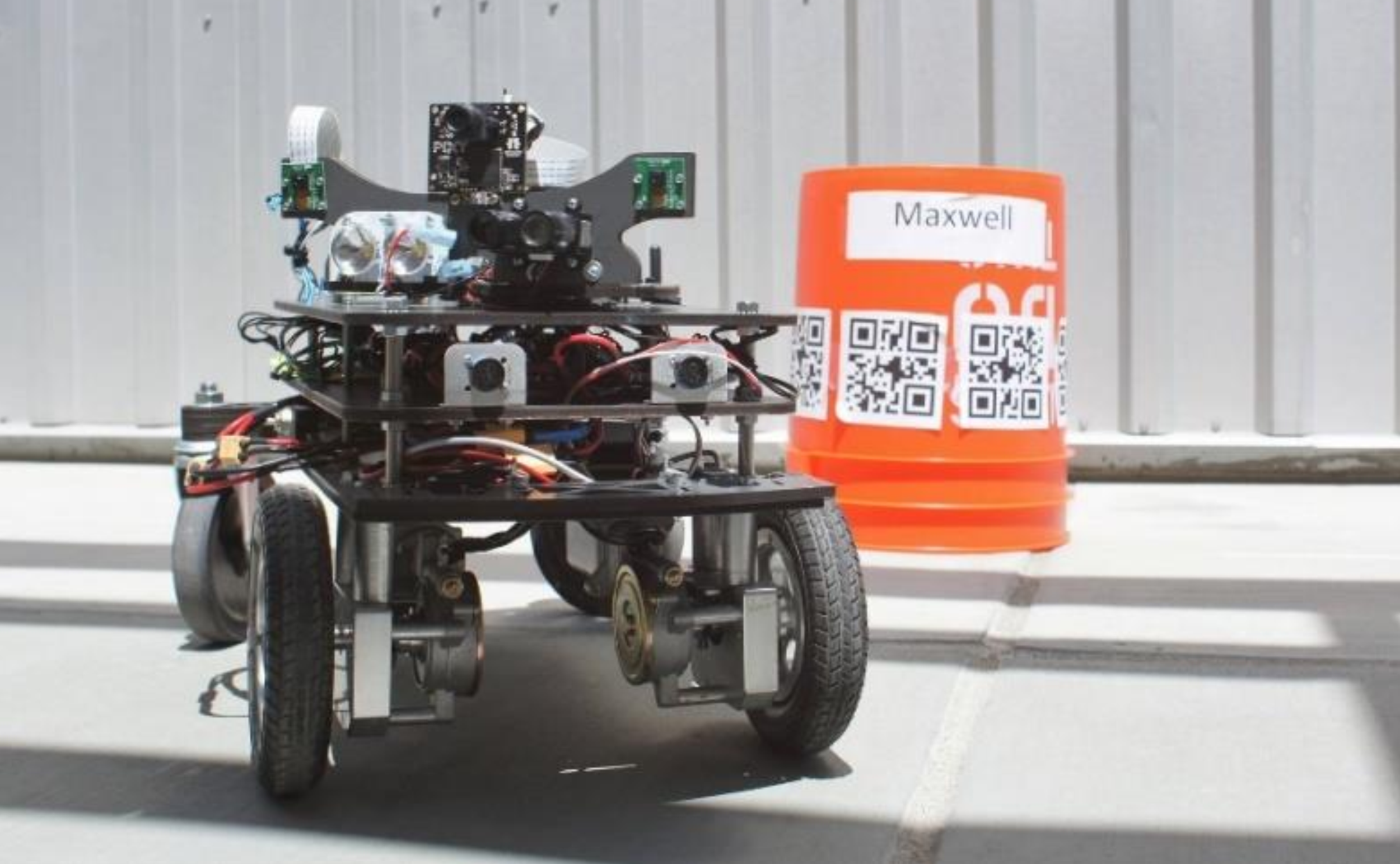
The Triage Assistance Rescue Robot (TARRo2) was an autonomous mobile robot developed to aid first responders in allocating resources during structural collapse disasters. Its mission was to find and assess victims in a structural collapse disaster, then relay vitals and location information wirelessly to operators. The robot utilized computer vision, LIDAR, ultrasonic sensors and wheel encoders. A scanning turret was implemented to efficiently scan wide fields while the vehicle autonomously avoided obstacles. TARRo2 participated in the Rescue Robotics competition hosted by the University of California, Irvine. Orange buckets were used as victims and QR codes provided victim information to relay to a First Responder Interface. The robot earned 1st place in the design review and placed 3rd in the ground division competition. TARRo2 was designed in SolidWorks coded using both C++ and python.
During my second year on the project, my duties as team lead were to organize the team structure and manage the progress of the development to meet deadlines and project specifications. This was accomplished through creating an interdisciplinary training program to provide a basis of communication within the team of 10 junior college students. The robot development was divided into 3 segments: the mobility platform, the computation platform, and the forward sensor array. Progress was monitored using a Gantt chart, and systems were verified during unit and integration tests.


