Maxar Space Robotics - Mechatronics Engineer
Pasadena, Jan 2021 - Present
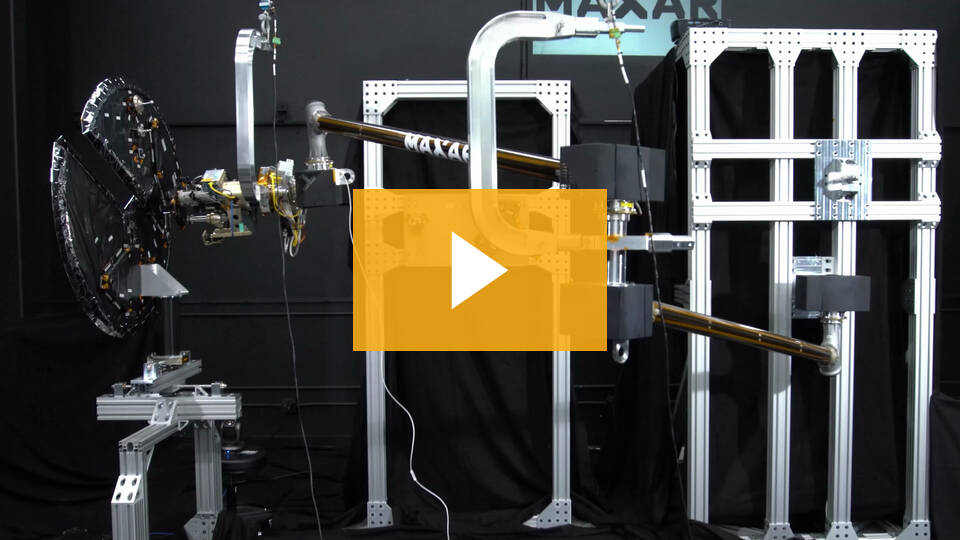
As a mechatronics engineer, I played an important role in the integration of mechanical, electrical, and software into complex robotic space systems for on-orbit (SPIDER/OSAM-1) and lunar (SAMPLR) missions. As the lead robotic operator, I served a key role in my team which successfully demonstrated to NASA a full scale 0g capable SPIDER arm in an actively offloaded environment, as shown in the video below. I continued to contribute to the success of this mission as the Robotic Arm Assembly Integration lead.
I have also contributed to a win of phase 1 proposals as a mechanical lead, and served as lead design engineer on internal hardware projects.